摘要:
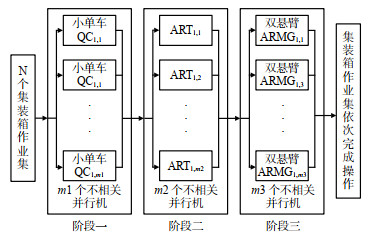
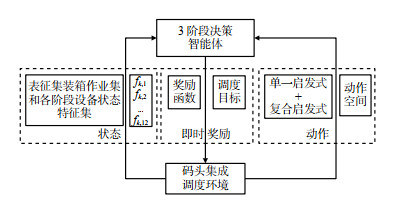
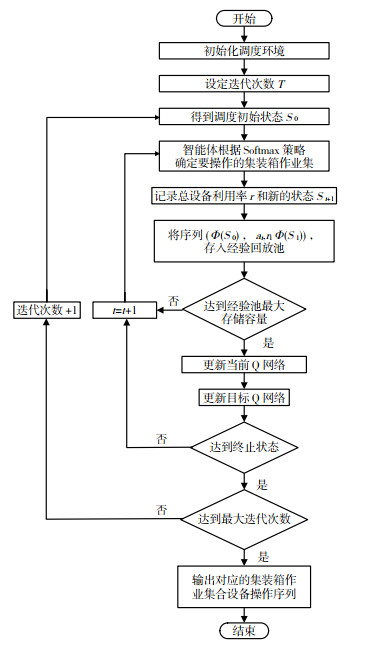
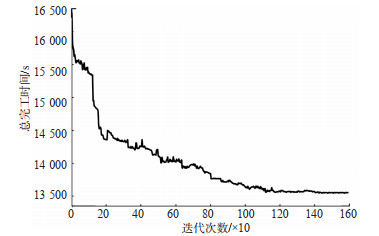
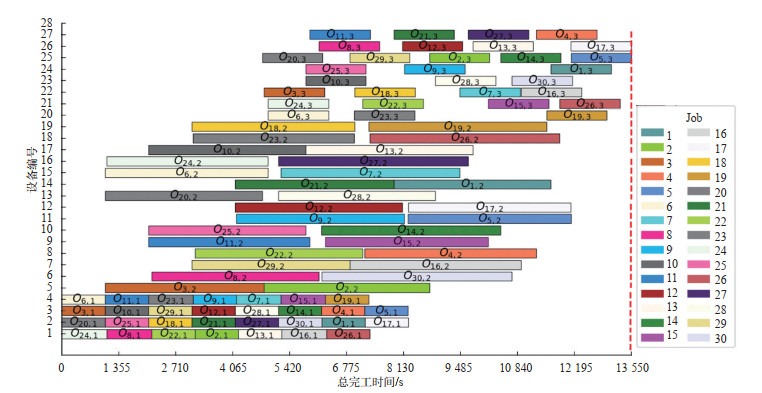
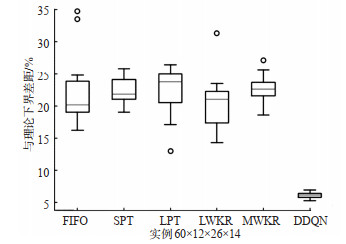
针对自动化集装箱码头卸货过程中岸桥、智能运输机器人和场桥设备交互作业, 实际调度环境复杂多变等问题, 以最小化最大完工时间为目标, 构建基于混合流水车间的三阶段集装箱码头集成调度模型, 为解决自动化码头调度环境动态性强的特点, 使用1种深度强化学习算法(DDQN)进行求解。依据码头实际调度情况, 使用神经网络实时拟合动作-值函数, 把各阶段设备状态数据输入模型, 采用经验回放机制训练模型, 把单一启发式规则加复合启发式规则作为设备候选行为, 通过强化学习动作选择与动作评估机制, 得到最优的集装箱-设备组合策略, 并与精确算法和常用的几种元启发式策略进行对比分析。结果表明: 较大规模算例下, 与目前较为先进的粒子群算法相比, 所提方法的总作业时间平均降低了7.84%, 与理论下界值的差距分别为6.0%, 5.6%, 4.6%, 三阶段设备负载较为均衡, 设备平均利用率为89%, 满足实际应用需求; 小规模算例下, 与Gurobi求解器的总完工时间平均误差为1.99%, 且随着算例规模增加, 所提算法在求解时间上显现出一定的优势, 求解时间最大提升59%, 验证了所提方法对于提升自动化集装箱码头运行效率的可行性和高效性。