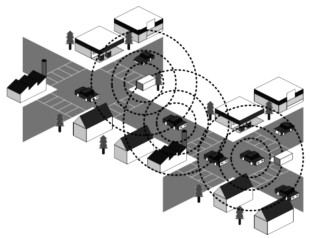
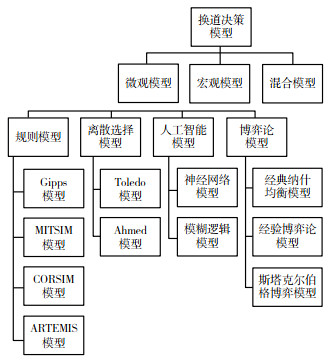
摘要: 实现智能网联汽车换道的安全决策是改善交通安全、提高道路机动性的关键任务。本文探究了智能网联汽车换道的安全性问题,从驾驶安全的角度出发,分析了极端换道行为和紧急换道行为给交通安全带来的不利影响,强调风险评估的重要性,并梳理了利用环境传感器、交通冲突指标、车辆微观轨迹数据等换道风险评估方法。通过风险评估识别风险,并采取相应的措施,能够显著减少危险换道行为导致的交通事故。阐述了智能网联汽车在传统环境以及车联万物(vehicle to everything,V2X)场景下,通过获取环境信息完成换道决策的方法;重点剖析了智能网联汽车在V2X环境下,通过周围环境的感知和识别、目标检测、数据处理进行决策,并对未来智能网联汽车在V2X环境下实现安全决策提出合理建议。然后分析了现有换道决策模型方法,归纳为4类:即规则模型、离散选择模型、人工智能模型、博弈论模型;系统地总结了决策模型在国内外道路行车安全领域的研究和应用现状、存在的问题,以及应用展望。综上所述,尽管智能网联汽车的换道技术已取得重大研究成果,但未来仍存在很多挑战。针对现有研究中存在的问题:低等级自动驾驶环境情况下如何安全可靠地进行决策、智能网联汽车在低渗透率情况下如何做出更为高效和智能的驾驶决策、信息不完全情况下如何实现安全决策、在换道决策模型算法的可优化性方面如何改进,提出可行的解决方案。
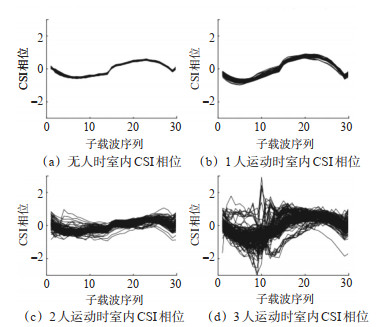
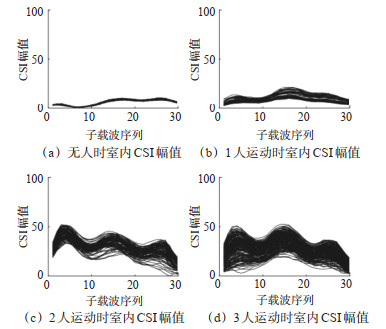
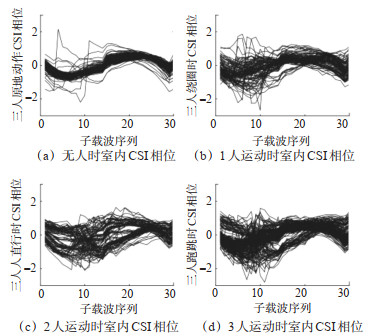
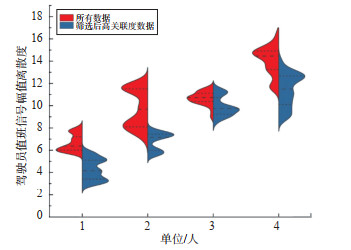
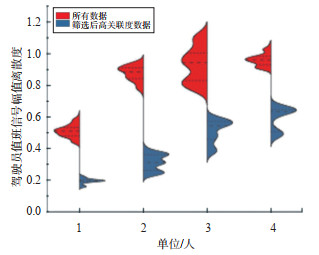
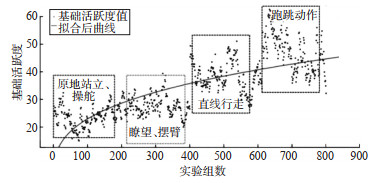
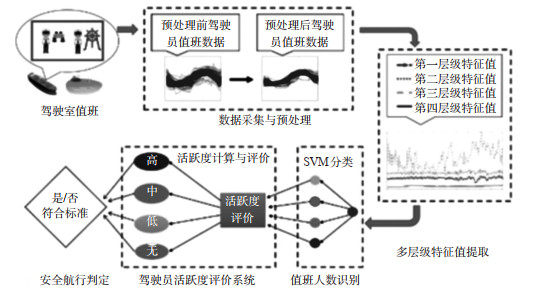
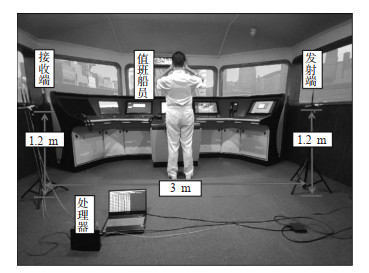
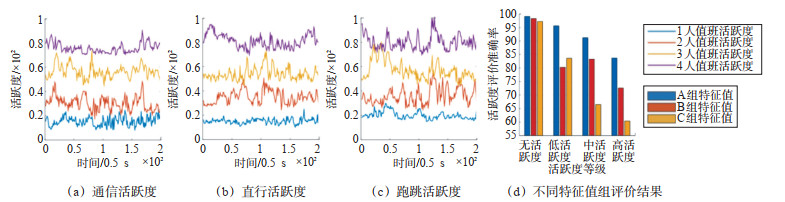
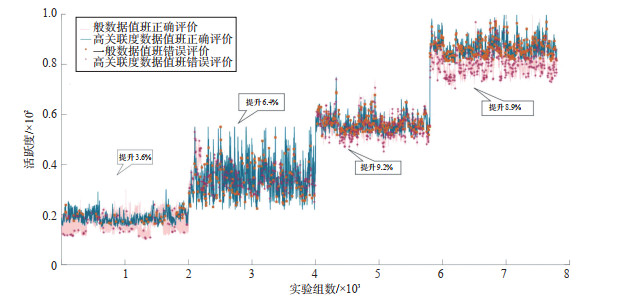
摘要: 船舶驾驶台人员包括按照规定要求的常规值班人员和特殊情况下额外的瞭望人员或船长、引航员等,驾驶台人员活跃度是判断其工作状态的重要指标之一。传统的基于计算机视觉的人员检测方法在面对船舶驾驶台遮挡物多、夜间或恶劣天气下光线不足等问题时,精度明显降低。为解决该问题,提出了1种基于普通商用Wi-Fi设备的活跃度感知方法。由于船体材质、结构特点以及变化的运动状态导致动态多径多、信号噪声强,对Wi-Fi设备造成干扰,为此设计了值班高关联度数据(duty high correlation data,DHCD)选择模块及基于信道状态信息(channel state information,CSI)的多层级特征提取模块。DHCD选择模块分析驾驶台人员不同航行、值班情况下的CSI特点,对比0~5人在驾驶台内值班、工作时的信道变化,利用模糊C-means聚类算法提取CSI中对值班人员行为反应最灵敏的信道,去除对信号噪声反应敏感的信道信息;通过多层级特征提取模块计算去噪后CSI数据的幅值与相位离散度、多链路融合离散度、变异指数等多层特征,作为活跃度评价基础参数。依据驾驶台值班要求设计了驾驶台人员活跃度评价模块,采用支持向量机算法判断驾驶台人员数量,采用客观赋权法得到基础参数权重,结合人数信息与权重信息评价驾驶台人员活跃度。实验结果表明:使用DHCD选择模块和多层级模块处理后的多层级特征将驾驶台人员数量检测精度提升至89.6%,对比直接使用原始数据时检测精度提升7.1%。在夜间、雨雾天气等光照不足情况下,基于计算机视觉方法的检测精度会由光线充足时的96.2%降至60.3%,而该方法监测精度不会降低。因此,基于CSI的驾驶台人员活跃度检测方法丰富了驾驶台人员检测算法,能有效识别船舶驾驶台人员是否符合安全值班的基本要求。