

A Visualization Analysis and Development Trend of Intelligent Ship Studies
-
摘要: 为了更好地把握智能船舶研究领域的前沿问题及发展现状, 针对智能船舶领域相关主题, 基于中国知网(CNKI)和Web of Science数据库中2010-2020年的文献检索结果, 运用知识图谱从计量统计的角度从时间、作者、机构以及关键词4个方面系统地呈现了智能船舶领域发展的趋势、前沿和热点。在此基础上, 从智能船舶的态势感知、智能避碰、智能控制、网络通信和法律规则研究5个研究方向分析了智能船舶研究趋势和热点问题, 并提出了智能船舶人机共融及决策技术研究、编队航行风险研究以及传统/智能船舶混行风险评价研究这3个重点研究方向。研究结果表明, 从2015年开始, 智能船舶相关研究文章快速增长, 增长幅度在每年14篇以上, 平均增长率达58%; 国内智能船舶主要研究机构包括武汉理工大学、大连海事大学、上海交通大学等, 国外主要研究机构包括挪威科技大学和代尔夫特理工大学; 智能船舶领域的研究热点包括态势感知、智能避碰、智能控制、网络通信安全和法律安全。Abstract: This paper conducts a comprehensive literature review of intelligent ship based on the studies published on the China Knowledge Network (CNKI) and Web of Science databases to investigate the status quo and the cutting, edge issues in development of intelligent ship.The knowledge graphs are used to systematically present the trends, frontiers, and hot spots in intelligent ship from time, author, institution, and keywords.On this basis, the research trends and hot issues of intelligent ship are analyzed from intelligent situational awareness, collision avoidance, intelligent control, network communication, and the rule of law study. Besides, three key research directions are proposed, including human, machine integration and decision, making technology for intelligent ship, risks of formation navigation, and risk evaluation of mixing navigation of traditional/intelligent ships. The results show that since 2015, published papers related to intelligent ship have increased more rapidly than which between 2010 and 2014, with an average growth rate of 58%(more than 14 articles per year). Key research institutions in China contributing the most to this field include Wuhan University of Technology, Dalian Maritime University, and Shanghai Jiaotong University. Major foreign research institutions include Norwegian University of Science and Technology and Delft University of Technology. Research hotspots in intelligent ship refer to situational awareness, intelligent collision avoidance, intelligent control, network communication security, and legal security.
-
Key words:
- traffic engineering /
- intelligent ship /
- navigation safety /
- knowledge graph /
- subject analysis
-

图 1 2010—2020年国内外智能船舶研究趋势
Figure 1. Research trends of intelligent ship at home and abroad from 2010 to 2020

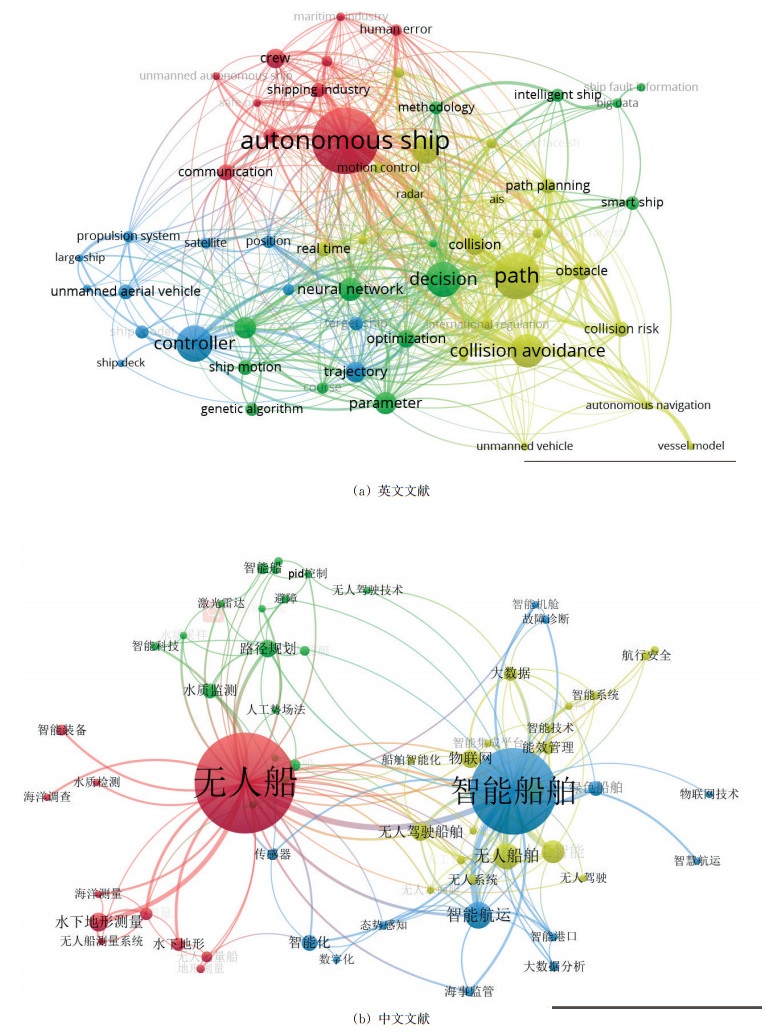
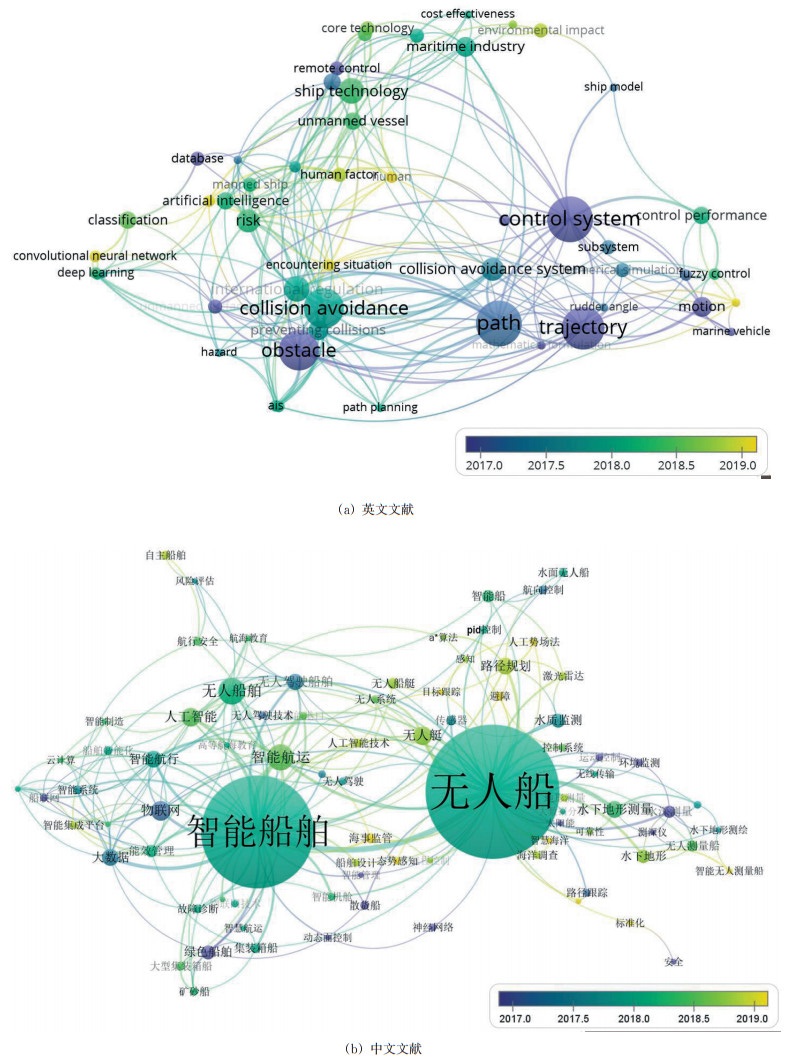
图 3 智能船舶研究关键词演化趋势图
Figure 3. Evolution trends of keywords in intelligent ship research
表 1 国外主要的研究机构
Table 1. Major foreign research institutions
机构 国家/地区 文献数量/篇 挪威科技大学/ Norwegian University of Science Technology 挪威 15 代尔夫特理工大学/ Delft University of Technology 荷兰 14 卡萨布兰卡哈桑二世大学/ Hassan II University of Casablanca 摩洛哥 7 阿尔托大学/ Aalto University 芬兰 7 VTT芬兰技术研究中心/ VTT Technical Research Center Finland 芬兰 6 格丁尼亚海事大学/ Gdynia Maritime University 波兰 5  下载: 导出CSV
下载: 导出CSV
表 2 智能避碰相关文献
Table 2. Literature on intelligent collision avoidance
作者(年份) 题目 研究成果 李丽娜, 等[21](2011) 船舶拟人智能避碰决策理论的集成机器学习策略 对船舶拟人智能避碰决策的意义、目标和实现方法进行了概述,并在此基础上提出了基于机器学习构建动态避碰知识库的关键技术及智能避碰理论的机器学习机制 郑俏妍[22](2016) 海上多目标船物联网智能避碰辅助决策研究 基于模拟退火的粒子群优化算法应用于海上多目标船舶智能避碰辅助决策中,建立船舶转向避碰幅度目标函数模型 Li W., 等[23](2017) Research on intelligent avoidance method of shipwreck based on big data analysis 提出了1种基于大数据分析的船舶智能避碰方法 薛惠,等[24](2017) 船舶自动智能避碰数学模型及其计算机仿真研究 基于遗传算法的自动化智能避碰策略 H.Namgung, 等[25](2018) Information exchange system for efficient operations of autonomous ship 提出了1种基于模糊推理理论的碰撞风险评估系统 Wang等[26](2019) Research on intelligent collision avoidance decision-making of unmanned ship in unknown environments 基于马尔可夫决策过程,建立了无人驾驶船舶的智能避碰模型 R.Zaccone,等[27](2019) A collision avoidance algorithm for ship guidance applications 提出了1种基于快速搜索随机树(RRT*)算法的船舶远海航行避碰算法 Huang Y.,等[28](2020) A ship collision avoidance system for human-machine cooperation during collision avoidance 概述了智能船避碰过程中现有的人机交互模式,提出了1个面向人机界面的避碰系统的框架,有助于船舶的自主避碰
下载: 导出CSV
表 3 智能船智能控制相关文献
Table 3. Literature on intelligent control of intelligent ship
作者(年份) 题目 研究成果 Zhang R.L., 等[35](2017) Conversion timing of seafarer's decision-making for unmanned ship navigation 构建无人驾驶船舶群监控模型,提出了1个框架来确定车载决策之间的关系和海岸监视船的过程数据检测、跟踪、分析和损失, 和应用程序的决策算法 Yao B.等[36](2018) Research and comparison of automatic control algorithm for unmanned ship 将模糊算法与神经网络相结合,构建了改进的基于神经网络的PID控制器 Xue J.等[37](2019) Multi-attribute decision-making method for prioritizing maritime traffic safety influencing factors of autonomous ships' maneuvering decisions using grey and fuzzy theories 利用经验丰富的海员的实验数据,利用仿真平台,提出了1种基于灰色和模糊理论的推理模型 张显库, 等[38](2019) 船舶运输安全保障下的智能船舶运动控制策略 采用四维Norrbin非线性数学模型和二阶闭环增益成形算法设计控制策略 徐海祥, 等[39](2020) 面向智能船舶的自动靠泊鲁棒自适应控制 提出了1种鲁棒自适应控制律;设计了自适应律估计环境扰动,并引入鲁棒项补偿岸壁效应对船舶的干扰,以消除控制输出的抖振现象
下载: 导出CSV
-
[1] 郭胜童, 徐凯, 彭宜蔷. 全球智能船舶及规范发展动向[J]. 中国船检, 2019 (4): 29-34. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGCJ201904010.htmGUO Shengtong, XU Kai, PENG Yiqiang. Global intelligent ship and its normative development trend[J]. China Ship Survey, 2019 (4): 29-34. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGCJ201904010.htm [2] VAN ECK N J, WALTMAN L. Software survey: VOSviewer, a computer program for bibliometric mapping[J]. Scientometrics, 2010, 84 (2): 523-538. doi: 10.1007/s11192-009-0146-3 [3] 杨坤, 黄立新. 无人船的障碍物动态识别[J]. 智能计算机与应用, 2019, 9 (6): 193-196. doi: 10.3969/j.issn.2095-2163.2019.06.041YANG Kun, HUANG Lixin, Dynamic obstacle identification for the moving USV[J]. Intelligent Computer and Applications, 2019, 9 (6): 193-196. (in Chinese) doi: 10.3969/j.issn.2095-2163.2019.06.041 [4] 王贵槐, 谢朔, 柳晨光, 等. 基于激光雷达的内河无人船障碍物识别方法[J]. 光学技术, 2018, 44 (5): 602-608. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJS201805015.htmWANG Guihuai, XIE Shuo, LIU Chenguang, et al. Obstacle identification method based on laser radar for inland unmanned vessel[J]. Optical Technique, 2016, 44(5): 602-608. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-GXJS201805015.htm [5] 王华鲜, 华容, 刘华平, 等. 无人机群多目标协同主动感知的自组织映射方法[J]. 智能系统学报, 2020, 15 (3): 609-614. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNXT202003029.htmWANG Huaxian, HUA Rong, LIU Huaping, et al. Self-organizing feature map method for multi-target active perception of unmanned aerial vehicle systems[J]. CAAI Transactions on Intelligent Systems, 2020, 15 (3): 609-614. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZNXT202003029.htm [6] 雷进宇, 初秀民, 蒋仲廉, 等. 基于可视分析的船舶航行态势感知系统设计[J]. 中国航海, 2018, 41 (3): 47-52. doi: 10.3969/j.issn.1000-4653.2018.03.010LEI Jinyu, CHU Xiumin, JIANG Zhonglian, et al. Situation awareness system for vessel navigation based on visual analytics[J]. Navigation of China, 2018, 41 (3): 47-52. (in Chinese) doi: 10.3969/j.issn.1000-4653.2018.03.010 [7] WANG N, TAN Y, LIU S M. Ship domain identification using fast and accurate online self-organizing parsimonious fuzzy neural networks[C]. 30th Chinese Control Conference, Yantai, China : IEEE, 2011. [8] ZHOU X Y, LIU Z J, WU Z L, et al. Quantitative processing of situation awareness for autonomous ships navigation[J]. TransNav the International Journal on Marine Navigation and Safety of Sea Transportation, 2019, 13 (1): 25-31. doi: 10.12716/1001.13.01.01 [9] ONUNKA C, NNADOZIE R C. Modelling the performance of USV manoeuvring and target tracking: An approach using frequency modulated continuous wave radar rotary system[J]. Springer Plus, 2013, 2 (1): 1-9. doi: 10.1186/2193-1801-2-1 [10] 刘德庆, 张杰, 金久才. 基于三维激光雷达的无人船障碍物自适应栅格表达方法[J]. 中国激光, 2020, 47 (1): 273-278. https://www.cnki.com.cn/Article/CJFDTOTAL-JJZZ202001033.htmLIU Deqing, ZHANG Jie, JIN Jiucai. Adaptive grid representation method for unmanned surface vehicle obstacle based on three-dimensional lidar[J]. Chinese Journal of Lasers, 2020, 47 (1): 273-278. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JJZZ202001033.htm [11] LI J, WANG H, ZHAO W, et al. Ship's trajectory planning based on improved multiobjective algorithm for collision avoidance[J]. Journal of Advanced Transportation, 2019(1): 1-12. http://www.researchgate.net/publication/332312540_Ship's_Trajectory_Planning_Based_on_Improved_Multiobjective_Algorithm_for_Collision_Avoidance [12] XUE J, WU C, CHEN Z, et al. Modeling human-like decision-making for inbound smart ships based on fuzzy decision trees[J]. Expert Systems with Applications, 2019(115): 172-188. http://www.sciencedirect.com/science/article/pii/S095741741830469X [13] HU Y, MENG X, ZHANG Q, et al. A Real-time collision avoidance system for autonomous surface vessel using fuzzy logic[J]. IEEE Access, 2020 (8): 108835-108846. http://ieeexplore.ieee.org/document/9115023/references [14] 曾勇, 张金奋, 张明阳, 等. 基于粒子群-遗传优化算法的船舶避碰决策[J]. 中国航海, 2020, 43 (1): 1-6+28. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH202001001.htmZENG Yong, ZHANG Jinfen, ZHANG Mingyang, et al. Collision avoidance decision-making based on particle swarm optimization and genetic algorithm[J]. Navigation of China, 2020, 43 (1): 1-6+28. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZGHH202001001.htm [15] SZLAPCZYNSKI R, SZLAPCZYNSKA J. On evolutionary computing in multi-ship trajectory planning[J]. Applied Intelligence, 2012, 37 (2): 155-174. doi: 10.1007/s10489-011-0319-7 [16] 冷静, 刘健, 徐红丽. 实时避碰的无人水面机器人在线路径规划方法[J]. 智能系统学报, 2015, 10 (3): 343-348. https://www.cnki.com.cn/Article/CJFDTOTAL-ZNXT201503002.htmLENG Jing, LIU Jiang, XU Hongli. Online path planning of an unmanned surface vehicle for real-time collision avoidance[J]. CAAI Transactions on Intelligent Systems, 2015, 10(3) : 343-348. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-ZNXT201503002.htm [17] WU X, CHEN H, CHEN C, et al. The autonomous navigation and obstacle avoidance for USVs with ANOA deep reinforcement learning method[J]. Knowledge-Based Systems, 2020 (196) : 1-12. http://www.sciencedirect.com/science/article/pii/S0950705119305350 [18] WOO J, KIM N. Collision avoidance for an unmanned surface vehicle using deep reinforcement learning[J]. Ocean Engineering, 2020 (199) : 1-16. http://arxiv.org/abs/2006.09540 [19] GUO S, ZHANG X, ZHENG Y, et al. An Autonomous path planning model for unmanned ships based on deep reinforcement learning[J]. Sensors, 2020, 20 (2): 426. doi: 10.3390/s20020426 [20] 汤国瑞, 谢新连, 潘伟. 复杂水域船舶智能避碰专家系统设计[J]. 船海工程, 2019, 48 (3): 160-165. doi: 10.3963/j.issn.1671-7953.2019.03.037TANG Guorui, XIE Xinlian, PAN Wei. Design of intelligent collision avoidance expert system for ships in complex waters[J]. Ship & Ocean Engineering, 2019, 48(3): 160-165. (in Chinese) doi: 10.3963/j.issn.1671-7953.2019.03.037 [21] 李丽娜, 王俊玲, 陈国权. 船舶拟人智能避碰决策理论的集成机器学习策略[J]. 信息与控制, 2011, 40 (3): 359-368. https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201103018.htmLI Lina, WANG Junling, CHEN Guoquan. Integrated machine learning strategy of PIDVCA[J]. Information and Control, 2011, 40 (3): 359-368. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201103018.htm [22] 郑俏妍. 海上多目标船物联网智能避碰辅助决策研究[J]. 舰船科学技术, 2016, 38 (16): 94-96. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201616032.htmZHENG Qiaoyan. The research on intelligent collision avoidance decision support of marine multi-objective in ship things[J]. Ship Science and Technology, 2016, 38(16): 94-96. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201616032.htm [23] LI W, HUANG Q. Research on intelligent avoidance method of shipwreck based on bigdata analysis[J]. Polish Maritime Research, 2017, 24 (S3): 213-220. doi: 10.1515/pomr-2017-0125 [24] 薛惠, 何栋. 船舶自动智能避碰数学模型及其计算机仿真研究[J]. 舰船科学技术, 2017, 39 (16): 31-33. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201716012.htmXUE Hui, HE Dong. Research on mathematical model and computer simulation of ship automatic intelligent collision avoidance[J]. Ship Science and Technology, 2017, 39(16): 31-33. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201716012.htm [25] NAMGUNG H, JEONG J S, KIM J S, et al. Information exchange system for efficient operations of autonomous ship[C]. International Conference on Fuzzy Theory and Its Applications, Daegu, Korea: IEEE, 2018. [26] WANG C, ZHANG X, CONG L, et al. Research on intelligent collision avoidance decision-making of unmanned ship in unknown environments[J]. Evolving Systems, 2019, 10 (4): 649-658. doi: 10.1007/s12530-018-9253-9 [27] ZACCONE R, MARTELLI M. A collision avoidance algorithm for ship guidance applications[J]. Journal of Marine Engineering & Technology, 2020, 19 (S1): 62-75. [28] HUANG Y, CHEN L, NEGENBORN R R, et al. A ship collision avoidance system for human-machine cooperation during collision avoidance[J]. Ocean Engineering, 2020 (217) : 107913. http://www.sciencedirect.com/science/article/pii/S0029801820308738 [29] 刘智心, 初秀民, 郑茂, 等. 智能船舶船岸协同实验关键技术研究[J]. 交通信息与安全, 2020, 38 (2): 63-70.LIU Zhixin, CHU Xiumin, ZHENG Mao, et al. A ship-to-shore cooperative simulation system for intelligent ship[J]. Journal of Transport Information and Safety, 2020, 38(2): 63-70. (in Chinese) [30] 徐海祥, 李超逸, 余文曌, 等. 智能船舶循迹控制方法研究[J]. 华中科技大学学报(自然科学版), 2020, 48(8): 103-108. https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG202008018.htmXU Haixiang, LI Chaoyi, YU Wenzhao, et al. Research method for path following of intelligent ship[J]. J. Huazhong Univ. of Sci. & Tech. (Natural Science Edition), 2020, 48(8): 103-108. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG202008018.htm [31] 王欣, 刘正江, 李铁山, 等. 船舶航向离散非线性系统自适应神经网络控制[J]. 哈尔滨工程大学学报, 2016, 37(1): 123-126+131. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201601023.htmWANG Xin, LIU Zhengjiang, LI Tieshan, et al. Neural network-based adaptive control for a ship course discrete-time nonlinear system[J]. Journal of Harbin Engineering University, 2016, 37 (1): 123-126+131. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201601023.htm [32] 任云烨. 模糊控制在船舶智能控制中的应用研究[J]. 舰船科学技术, 2016, 38 (2): 70-72. https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201602025.htmREN Yunye. Study on the application of fuzzy control in intelligent control of ship[J]. Ship Science and Technology, 2016, 38 (2): 70-72. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201602025.htm [33] GUO S, ZHANG X, ZHENG Y, et al. An autonomous path planning model for unmanned ships based on deep reinforcement learning[J]. Sensors, 2020, 20 (2): 426. doi: 10.3390/s20020426 [34] LYU H, YIN Y. COLREGS-constrained real-time path planning for autonomous ships using modified artificial potential fields[J]. The Journal of Navigation, 2019, 72 (3) : 588-608. doi: 10.1017/S0373463318000796 [35] ZHANG R L, FURUSHO M. Conversion timing of seafarer's decision-making for unmanned ship navigation[J]. TransNav: International Journal on Marine Navigation and Safety of Sea Transportation, 2017, 11 (3): 463-468. doi: 10.12716/1001.11.03.11 [36] YAO B, YANG J, ZHANG Q, et al. Research and comparison of automatic control algorithm for unmanned ship[C]. 3rd International Conference on Control and Robotics Engineering. Nagoya, Japan: IEEE, 2018. [37] XUE J, P.H.A.J.M. Van Gelder, RENIERS G, et al. Multi-attribute decision-making method for prioritizing maritime traffic safety influencing factors of autonomous ships'maneuvering decisions using grey and fuzzy theories[J]. Safety Ence, 2019 (120) : 323-340. http://www.sciencedirect.com/science/article/pii/S0925753518321775 [38] 张显库, 韩旭. 船舶运输安全保障下的智能船舶运动控制策略[J]. 中国舰船研究, 2019, 14 (增刊1): 1-6. https://www.cnki.com.cn/Article/CJFDTOTAL-JCZG2019S1001.htmZHANG Xianku, HAN Xu. The motion control strategy for intelligent ships based on ship transportation safeguard[J]. Chinese Journal of Ship Research, 2019, 14(S1): 1-6. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-JCZG2019S1001.htm [39] 徐海祥, 朱梦飞, 余文曌, 等. 面向智能船舶的自动靠泊鲁棒自适应控制[J]. 华中科技大学学报(自然科学版), 2020, 48 (3): 25-29+40. https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG202003005.htmXU Haixiang, ZHU Mengfei, YU Wenzhao, et al. Robust adaptive control for automatic berthing of intelligent ships[J]. J. Huazhong Univ. of Sci. & Tech. (Natural Science Edition), 2020, 48 (3): 25-29+40. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-HZLG202003005.htm [40] 范怀谷. 智能无人船舶发展面临的问题和解决办法[J]. 船舶标准化工程师, 2018, 51 (3): 16-19. https://www.cnki.com.cn/Article/CJFDTOTAL-CBBZ201803010.htmFAN Huaigu. Problems and solutions of development of intelligent unmanned ships[J]. Ship Standardization Engineer, 2018, 51 (3): 16-19. (in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-CBBZ201803010.htm [41] ZHANG Mingyang, ZHANG Di, YAO Houjie, et al. A probabilistic model of human error assessment for autonomous cargo ships focusing on human-autonomy collaboration[J]. Safety Science, 2020 (130) : 104838. http://www.sciencedirect.com/science/article/pii/S0925753520302356 [42] 王远渊, 刘佳仑, 马枫, 等. 智能船舶远程驾驶控制技术研究现状与趋势[J]. 中国舰船研究, 2021, 16 (1): 18-31.WANG Yuanyuan, LIU Jialun, MA Feng, et al. Review and prospect of remote control intelligent ships[J]. Chinese Journal of Ship Research, 2021, 16 (1): 18-31. (in Chinese) -

 点击查看大图
点击查看大图

计量
- 文章访问数: 2295
- HTML全文浏览量: 829
- PDF下载量: 235
- 被引次数: 0